目录
| 银杏科技有限公司旗下技术文档发布平台 | |||
| 技术支持电话 | 0379-69926675-801 | ||
| 技术支持邮件 | Gingko@vip.163.com | ||
| 版本 | 日期 | 作者 | 修改内容 |
|---|---|---|---|
| V1.0 | 2020-07-12 | gingko | 初次建立 |
实验三十八:DSP_MATH库测试
一、 实验目的与意义
- 了解STM32 DSP结构。
- 了解STM32 DSP特征。
- 掌握DSP的使用方法。
- 掌握STM32 HAL库中DSP属性的配置方法。
- 掌握KEIL MDK 集成开发环境使用方法。
二、 实验设备及平台
三、 实验原理
1、DSP简介
- STMH32F7采用Cortex-M7内核,相比Cortex-M3系列除了内置硬件FPU单元,在数字信号处理方面还增加了DSP指令集,支持诸如单周期乘加指令(MAC),优化的单指令多数据指令(SIMD),饱和算数等多种数字信号处理指令集。相比Cortex-M3,Cortex-M4在数字信号处理能力方面得到了大大的提升。Cortex-M7执行所有的DSP指令集都可以在单周期内完成,而Cortex-M3需要多个指令和多个周期才能完成同样的功能。
- 接下来我们来看看Cortex-M7的两个DSP指令:MAC指令(32位乘法累加)和SIMD指令。
- 32位乘法累加(MAC)单元包括新的指令集,能够在单周期内完成一个32×32+64→64的操作或两个16×16的操作,其计算能力,如下表所示:
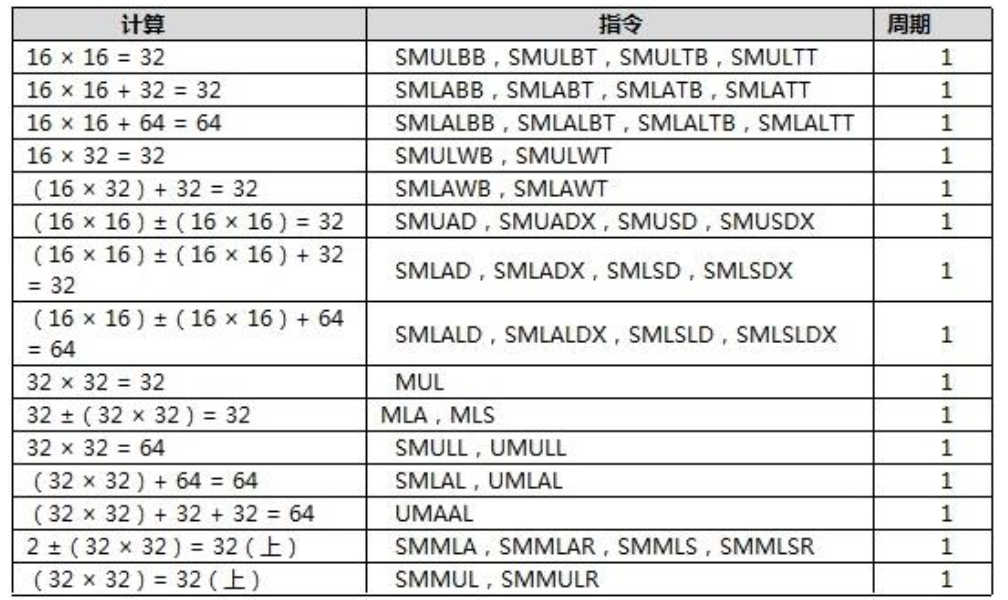
- Cortex-M7支持SIMD指令集,这在Cortex-M3/M0系列是不可用的。上述表中的指令,有的属于SIMD指令。与硬件乘法器一起工作(MAC),使所有这些指令都能在单个周期内执行。受益于SIMD指令的支持,Cortex-M4处理器能在单周期内完成高达32×32+64→64的运算,为其他任务释放处理器的带宽,而不是被乘法和加法消耗运算资源。
- 比如一个比较复杂的运算:两个16×16乘法加上一个32位加法,如图所示:

- 本实验进行DSP浮点运算测试,分别测试出不使用DSP MATH库和使用DSP MATH库的运算时间,进行对比。
四、 实验程序
1、 主函数
int main(void) { int i,j; int res; float time[2]; static int error_flag = 0; /* MCU 配置*/ /* 重置所有外设,初始化Flash 接口和Systick. */ HAL_Init(); /* 系统时钟配置 */ SystemClock_Config(); /* 初始化所有已配置的外设 */ MX_GPIO_Init(); MX_USART6_UART_Init(); MX_TIM3_Init(); usart6.initialize(115200); //串口波特设置 usart6.printf("\x0c"); //清屏 usart6.printf("\033[1;32;40m"); //设置终端字体为绿色 usart6.printf("Hello, I am iCore4!\r\n\r\n"); usart6.printf("DSP BasicMath TEST......\r\n"); while (1) { timeout = 0; __HAL_TIM_SET_COUNTER(&htim3,0); //重设 TIM3 定时器的计数器值 for(j = 0;j < 10000;j++){ for(i = 0;i < MAX_BLOCKSIZE;i ++){ res = SinCos_Test(testInput_f32[i],0); if(res != 0)error_flag ++; } } time[0] = __HAL_TIM_GET_COUNTER(&htim3)+ timeout*5000; timeout = 0; __HAL_TIM_SET_COUNTER(&htim3,0); for(j = 0;j < 10000;j++){ for(i = 0;i < MAX_BLOCKSIZE;i ++){ res = SinCos_Test(testInput_f32[i],1); if(res != 0)error_flag ++; } } time[1] = __HAL_TIM_GET_COUNTER(&htim3)+ timeout*5000; if(error_flag == 0){ usart6.printf("*NO DSP MATHLIB runtime:%0.1fms *USE DSP MATHLIB runtime:%0.1fms\r",time[0] / 10, time[1] / 10); LED_GREEN_ON; LED_RED_OFF; LED_BLUE_OFF; } else{//测试失败 usart6.printf("Error\r"); LED_GREEN_OFF; LED_RED_ON; LED_BLUE_OFF; } } }
2、 Sin Cos测试
int SinCos_Test(float testInput,unsigned char mode) { float Sinx,Cosx; float Result; switch (mode){ case 0://不使用DSP MATH库 Sinx = sinf(testInput); //不使用DSP优化的sin,cos函数 Cosx = cosf(testInput); Result = Sinx*Sinx + Cosx*Cosx; //计算结果应该等于1 Result = fabsf(Result-1.0f); //对比与1的差值 if(Result > DELTA)return -1; //判断 break; case 1://使用DSP MATH库 Sinx = arm_sin_f32(testInput); //使用DSP优化的sin,cos函数 Cosx = arm_cos_f32(testInput); Result = Sinx*Sinx + Cosx*Cosx; //计算结果应该等于1 Result = fabsf(Result-1.0f); //对比与1的差值 if(Result > DELTA)return -1; //判断 break; default: break; } return 0; }
五、 实验步骤
- 把仿真器与iCore4的SWD调试口相连(直接相连或者通过转接器相连);
- 把iCore4通过Micro USB线与计算机相连,为iCore4供电;
- 打开Keil MDK 开发环境,并打开本实验工程;
- 烧写程序到iCore4上;
- 也可以进入Debug 模式,单步运行或设置断点验证程序逻辑。
六、 实验现象
- 测试成功绿色LED点亮,并在终端上显示不使用DSP MATH和使用DSP MATH的运算时间;测试失败红色LED点亮,并在终端上显示“Error”。
